Kalman Filter
This example demonstrates the Kalman filter in PathSim for optimal state estimation of a linear dynamical system from noisy measurements. The filter recursively estimates the state of a moving object by combining predictions from a system model with noisy sensor measurements.
You can also find this example as a single file in the GitHub repository.
Import and Setup
First let's import the required classes and blocks:
System Parameters
We simulate a simple object moving with constant velocity. The true system has a velocity of 2 m/s, but we can only measure its position with noisy sensors. The Kalman filter will estimate both position and velocity from the noisy position measurements.
Kalman Filter Configuration
The Kalman filter requires several matrices:
- F: State transition matrix (how the state evolves)
- H: Measurement matrix (what we can observe)
- Q: Process noise covariance (model uncertainty)
- R: Measurement noise covariance (sensor uncertainty)
- x0: Initial state estimate
- P0: Initial error covariance
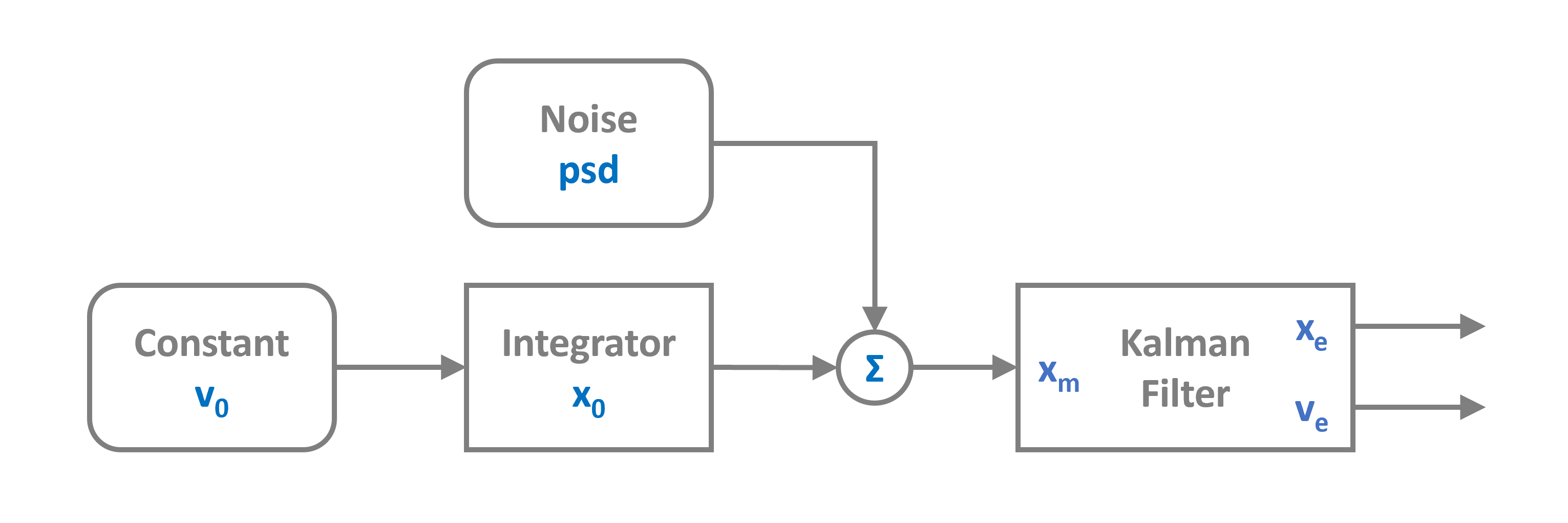
System Definition
Now we construct the complete system including:
- The true system (constant velocity integrator)
- Noisy measurement sensor
- Kalman filter for state estimation
The WhiteNoise block adds Gaussian noise to the true position measurement. The KalmanFilter processes these noisy measurements to estimate both position and velocity.
Simulation Setup and Execution
12:43:44 - INFO - LOGGING (log: True) 12:43:44 - INFO - BLOCKS (total: 8, dynamic: 1, static: 7, eventful: 0) 12:43:44 - INFO - GRAPH (nodes: 8, edges: 9, alg. depth: 2, loop depth: 0, runtime: 0.080ms) 12:43:44 - INFO - STARTING -> TRANSIENT (Duration: 20.00s) 12:43:44 - INFO - -------------------- 1% | 0.0s<0.4s | 4764.4 it/s 12:43:44 - INFO - ####---------------- 20% | 0.1s<0.4s | 4342.3 it/s 12:43:44 - INFO - ########------------ 40% | 0.2s<0.3s | 4487.6 it/s 12:43:44 - INFO - ############-------- 60% | 0.3s<0.2s | 4580.2 it/s 12:43:44 - INFO - ################---- 80% | 0.4s<0.1s | 3952.6 it/s 12:43:45 - INFO - #################### 100% | 0.5s<--:-- | 6627.6 it/s 12:43:45 - INFO - FINISHED -> TRANSIENT (total steps: 2000, successful: 2000, runtime: 455.49 ms)
Results: State Tracking
Let's visualize how well the Kalman filter tracks the true position and velocity:

Estimation Error Analysis
Now let's quantify the estimation accuracy by computing and plotting the absolute errors:
